Trong bối cảnh tự động hóa ngày càng phát triển, robot công nghiệp đang trở thành giải pháp then chốt giúp doanh nghiệp nâng cao năng suất, đảm bảo độ chính xác và giảm phụ thuộc vào nhân công. Tuy nhiên, để robot vận hành ổn định, an toàn và đạt hiệu suất tối đa, quy trình hướng dẫn lắp ráp robot công nghiệp đúng cách đóng vai trò vô cùng quan trọng.

Hướng Dẫn Lắp Ráp Robot với khu vực xưởng gọn gàng, đảm bảo an toàn lắp đặt
1. Giới thiệu tổng quan
1.1. Khái niệm lắp ráp robot công nghiệp
Lắp ráp robot công nghiệp là quá trình lắp đặt, cố định và cấu hình hoàn chỉnh một hệ thống robot để sẵn sàng đưa vào vận hành trong dây chuyền sản xuất. Quy trình này bao gồm nhiều công đoạn liên quan chặt chẽ với nhau, như:
- Lắp đặt phần cơ khí: đế robot, thân robot, các trục chuyển động
- Kết nối hệ thống điện – servo – cảm biến – encoder
- Kết nối tủ điều khiển và bộ điều khiển trung tâm
- Cài đặt phần mềm, căn chỉnh trục, hiệu chỉnh
1.2. Vai trò của quy trình lắp ráp đúng chuẩn
Việc lắp ráp sai quy trình hoặc thiếu kinh nghiệm có thể dẫn đến nhiều rủi ro như robot chạy không mượt, lỗi quá tải, mất tín hiệu điều khiển hoặc thậm chí gây tai nạn trong quá trình sản xuất. Một quy trình lắp ráp robot đúng chuẩn kỹ thuật mang lại nhiều lợi ích thiết thực cho doanh nghiệp, bao gồm:
- Đảm bảo độ chính xác cao trong chuyển động và thao tác của robot
- Giảm thiểu rung lắc, sai lệch trục và lỗi vận hành trong quá trình làm việc
- Kéo dài tuổi thọ của motor servo, hộp số và các linh kiện quan trọng
- Hạn chế sự cố dừng máy, giảm chi phí bảo trì và sửa chữa
- Đảm bảo an toàn cho người vận hành và khu vực làm việc xung quanh robot
1.3. Đối tượng nên tham khảo hướng dẫn (kỹ sư, nhà máy, đơn vị tích hợp)
Việc nắm rõ quy trình lắp ráp robot công nghiệp ngay từ đầu sẽ giúp các đơn vị giảm thiểu rủi ro, tối ưu hiệu quả đầu tư và đảm bảo hệ thống robot vận hành bền bỉ trong dài hạn. Hướng dẫn lắp ráp robot công nghiệp này được xây dựng nhằm hỗ trợ nhiều nhóm đối tượng khác nhau, bao gồm:
- Kỹ sư cơ điện – tự động hóa: cần tài liệu tham khảo chuẩn khi triển khai, lắp đặt hoặc bảo trì robot
- Nhà máy, xưởng sản xuất: đang đầu tư hoặc mở rộng hệ thống robot trong dây chuyền tự động
- Đơn vị tích hợp hệ thống (System Integrator): cần chuẩn hóa quy trình lắp ráp, cài đặt và bàn giao robot cho khách hàng
2. Phân loại robot cần lắp ráp
Robot công nghiệp được phân loại dựa trên ứng dụng thực tế và cấu trúc chuyển động. Việc xác định đúng loại robot ngay từ đầu giúp kỹ sư và doanh nghiệp lựa chọn phương án lắp ráp, căn chỉnh và cấu hình phù hợp, tránh sai sót trong quá trình triển khai và vận hành.
2.1. Robot hàn
Robot hàn là một trong những dòng robot công nghiệp được sử dụng phổ biến nhất trong các ngành như cơ khí chế tạo, ô tô, kết cấu thép và gia công kim loại. Robot hàn thường được tích hợp với nguồn hàn MIG, MAG, TIG hoặc hàn điểm.
Robot hàn đòi hỏi độ chính xác và ổn định cao, vì vậy quy trình lắp ráp phải tuân thủ nghiêm ngặt hướng dẫn của nhà sản xuất:
- Lắp đặt chắc chắn đế robot để hạn chế rung lắc khi hàn
- Bố trí dây cáp hàn, dây nguồn và dây tín hiệu hợp lý, tránh nhiễu điện
- Đồng bộ robot với nguồn hàn, bộ làm mát và thiết bị an toàn
- Căn chỉnh chính xác quỹ đạo và điểm hàn để đảm bảo chất lượng mối hàn
2.2. Robot gắp – đặt
Robot gắp – đặt được sử dụng rộng rãi trong các dây chuyền lắp ráp, phân loại sản phẩm, đóng gói và cấp phôi cho máy CNC. Robot gắp – đặt thường hoạt động với tốc độ cao, do đó việc lắp ráp và căn chỉnh chính xác sẽ giúp tăng năng suất và giảm lỗi sản phẩm.
Yêu cầu khi lắp ráp robot gắp – đặt:
- Xác định chính xác vị trí lắp robot so với băng tải hoặc máy gia công
- Lựa chọn và lắp đặt đầu gắp phù hợp (kẹp khí, hút chân không, kẹp điện)
- Căn chỉnh TCP và điểm gắp – đặt để đảm bảo độ lặp chính xác
- Kết nối và đồng bộ robot với cảm biến, băng tải, PLC
2.3. Robot palletizing
Robot palletizing được thiết kế chuyên dụng cho các công việc xếp hàng, đóng thùng và xếp pallet trong kho vận và nhà máy sản xuất.
Đặc điểm lắp ráp robot palletizing:
- Yêu cầu nền móng vững chắc do tải trọng lớn
- Không gian làm việc rộng, vùng hoạt động rõ ràng
- Lắp đặt đầu gắp chịu tải cao và có độ bền cơ khí tốt
- Thiết lập chính xác vùng an toàn và hàng rào bảo vệ
2.4. Robot mài – đánh bóng – gia công
Robot mài, đánh bóng và gia công được sử dụng trong các công đoạn hoàn thiện bề mặt sản phẩm, đặc biệt trong ngành kim loại, khuôn mẫu và cơ khí chính xác.
Yêu cầu lắp ráp đặc thù:
- Đảm bảo độ cứng vững của robot và giá đỡ
- Tích hợp cảm biến lực để kiểm soát áp lực mài
- Hệ thống hút bụi, che chắn bảo vệ robot
- Căn chỉnh chính xác đường chạy và tốc độ tiếp xúc
2.5. Robot theo trục: 4 trục, 6 trục, SCARA, Delta
Ngoài phân loại theo ứng dụng, robot công nghiệp còn được phân loại theo cấu trúc trục chuyển động, ảnh hưởng trực tiếp đến phương pháp lắp ráp và căn chỉnh:
- Robot 4 trục: thường dùng cho palletizing hoặc gắp đặt đơn giản, lắp ráp tương đối dễ, quỹ đạo hạn chế
- Robot 6 trục: linh hoạt cao, ứng dụng đa dạng (hàn, gắp, mài), yêu cầu căn chỉnh trục và TCP chính xác
- Robot SCARA: chuyên dùng cho lắp ráp linh kiện, tốc độ cao, yêu cầu độ phẳng và chính xác vị trí lắp
- Robot Delta: tốc độ rất cao, thường lắp treo, yêu cầu kết cấu khung chắc chắn và căn chỉnh đồng bộ các tay đòn
3. Chuẩn bị trước khi lắp ráp robot
Giai đoạn chuẩn bị trước khi lắp ráp robot công nghiệp đóng vai trò nền tảng, quyết định đến độ chính xác, độ ổn định và mức độ an toàn của toàn bộ hệ thống robot sau này. Việc kiểm tra đầy đủ linh kiện, đảm bảo hạ tầng kỹ thuật và tuân thủ tiêu chuẩn an toàn sẽ giúp quá trình lắp ráp diễn ra thuận lợi, hạn chế phát sinh lỗi và rủi ro trong vận hành.

Hướng Dẫn Lắp Ráp Robot bắt đầu từ việc kiểm tra đầy đủ tay robot và phụ kiện
3.1. Kiểm tra bộ linh kiện, phụ kiện kèm theo
Trước khi tiến hành lắp ráp, cần kiểm tra đầy đủ và chi tiết toàn bộ bộ linh kiện robot theo danh mục của nhà sản xuất, bao gồm:
- Thân robot và đế lắp đặt
- Tủ điều khiển
- Bộ dạy
- Servo motor, encoder, hộp số (nếu lắp rời)
- Dây cáp nguồn, cáp tín hiệu, cáp encoder
- Phụ kiện đi kèm: bu lông, chốt định vị, mặt bích, đầu nối
- Tài liệu kỹ thuật, sơ đồ đấu nối, hướng dẫn lắp ráp
3.2. Yêu cầu về nguồn điện, khí nén, không gian lắp đặt
Để robot công nghiệp hoạt động ổn định, cần chuẩn bị đầy đủ hạ tầng kỹ thuật trước khi lắp ráp:
Nguồn điện:
- Đúng điện áp và số pha theo yêu cầu của robot (1 pha hoặc 3 pha)
- Nguồn điện ổn định, có tiếp địa đạt chuẩn
- Trang bị aptomat, thiết bị bảo vệ quá tải, chống rò điện
Khí nén (nếu có):
- Áp suất và lưu lượng khí phù hợp với đầu gắp hoặc cơ cấu khí nén
- Hệ thống lọc – sấy khí để tránh hơi nước và bụi bẩn
- Đường ống khí bố trí gọn gàng, không cản trở chuyển động robot
Không gian lắp đặt:
- Đảm bảo diện tích làm việc đúng theo bán kính hoạt động của robot
- Nền móng chắc chắn, bằng phẳng, chịu được tải trọng robot
- Chừa khoảng không gian cho bảo trì, sửa chữa và thao tác kỹ thuật
3.3. Dụng cụ cần thiết
Quá trình lắp ráp robot công nghiệp yêu cầu dụng cụ chuyên dụng để đảm bảo độ chính xác và an toàn, bao gồm:
- Sử dụng cờ lê lực để đảm bảo bu lông được siết đúng mô-men quy định
- Bộ cờ lê, tuýp, tua vít cách điện
- Đồng hồ đo điện, bút thử điện
- Thước thủy, thước đo, thiết bị cân chỉnh
- Thiết bị nâng hạ (pa lăng, xe nâng) đối với robot tải lớn
- Máy tính hoặc thiết bị lập trình phục vụ cài đặt phần mềm
3.4. Các tiêu chuẩn an toàn cần tuân thủ
An toàn là yếu tố bắt buộc trong quá trình lắp ráp và vận hành robot công nghiệp. Thực hiện đúng và đầy đủ các quy định an toàn giúp đảm bảo an toàn cho người lao động, đồng thời hạn chế sự cố thiết bị và tránh gián đoạn quá trình sản xuất. Trước khi lắp ráp, cần đảm bảo tuân thủ các tiêu chuẩn an toàn cơ bản như:
- Tuân thủ tiêu chuẩn an toàn robot công nghiệp (ISO 10218 hoặc tương đương)
- Trang bị nút dừng khẩn cấp tại khu vực robot
- Lắp đặt hàng rào an toàn, cảm biến cửa hoặc rèm quang
- Khu vực lắp ráp có biển cảnh báo và giới hạn người không phận sự
- Kỹ thuật viên phải được đào tạo, sử dụng đầy đủ đồ bảo hộ lao động
4. Quy trình lắp ráp robot công nghiệp theo từng bước
Quy trình lắp ráp robot công nghiệp cần được thực hiện theo đúng thứ tự kỹ thuật, từ phần cơ khí, điện – điều khiển đến căn chỉnh và kiểm tra vận hành. Việc tuân thủ chặt chẽ từng bước giúp robot hoạt động chính xác, ổn định và an toàn ngay từ lần vận hành đầu tiên.

Hướng Dẫn Lắp Ráp Robot yêu cầu căn chỉnh độ cân bằng trước khi cố định hoàn toàn
4.1. Lắp đặt đế và giá đỡ robot
Đế và giá đỡ là nền tảng chịu toàn bộ tải trọng của robot, vì vậy cần được lắp đặt chính xác và chắc chắn. Đế robot lắp không chuẩn có thể gây rung lắc, sai quỹ đạo và giảm tuổi thọ cơ cấu truyền động.
- Kiểm tra độ phẳng và độ cứng vững của nền móng
- Đặt đế robot đúng vị trí theo bản vẽ layout
- Sử dụng bu lông neo đúng chủng loại, đúng kích thước
- Siết bu lông theo đúng lực siết khuyến nghị của nhà sản xuất
- Sử dụng thước thủy nhằm kiểm tra mức độ cân bằng của kết cấu
4.2. Cố định thân máy (thân robot)
Sau khi hoàn tất đế, tiến hành lắp thân robot lên giá đỡ. Trong bước này cần đảm bảo không va chạm, không xoắn thân robot, tránh làm ảnh hưởng đến các trục và hộp số bên trong.
- Sử dụng thiết bị nâng hạ phù hợp với trọng lượng robot
- Đặt thân robot đúng vị trí định vị trên đế
- Cố định bằng bu lông và chốt định vị
- Kiểm tra độ chắc chắn trước khi tháo thiết bị nâng
4.3. Lắp các trục chuyển động và hệ truyền động
Đối với robot lắp rời theo module, việc lắp các trục chuyển động cần độ chính xác cao. Sai lệch trong bước này có thể dẫn đến lệch trục, rung động hoặc lỗi quá tải khi robot vận hành.
- Lắp từng trục theo đúng thứ tự kỹ thuật
- Căn chỉnh vị trí trục và hướng lắp đúng chuẩn
- Kết nối hộp số, khớp nối và cơ cấu truyền động
- Đảm bảo các trục quay trơn tru, không bị kẹt
4.4. Lắp dây cáp tín hiệu, encoder, motor servo
Hệ thống dây cáp và servo đóng vai trò quan trọng trong điều khiển chuyển động robot. Việc đi dây không đúng kỹ thuật dễ gây nhiễu tín hiệu, đứt cáp hoặc lỗi điều khiển trong quá trình sử dụng.
- Lắp motor servo và encoder theo đúng vị trí từng trục
- Đi dây cáp nguồn và cáp tín hiệu theo rãnh thiết kế sẵn
- Hạn chế tối đa tình trạng gập khúc, xoắn chéo hay kéo giãn dây cáp
- Cố định dây bằng kẹp chuyên dụng để tránh ma sát khi robot chuyển động
4.5. Kết nối tủ điều khiển và bộ điều khiển trung tâm
Sau khi hoàn thiện phần cơ khí và đi dây, tiến hành kết nối robot với tủ điều khiển. Bước này yêu cầu độ chính xác cao, vì đấu nối sai có thể gây lỗi hệ thống hoặc hư hỏng thiết bị.
- Kết nối cáp nguồn, cáp servo, cáp I/O theo sơ đồ đấu nối
- Kiểm tra hệ thống nối đất và các điều kiện an toàn điện
- Kết nối robot với PLC hoặc hệ thống điều khiển trung tâm (nếu có)
- Kiểm tra lại toàn bộ đầu nối trước khi cấp nguồn
4.6. Căn chỉnh robot (calibration – zeroing – teach point)
Căn chỉnh là bước bắt buộc để robot hoạt động đúng quỹ đạo thiết kế. Việc căn chỉnh chính xác giúp robot di chuyển mượt, đúng vị trí và đảm bảo độ lặp cao trong sản xuất.
- Thực hiện zero hóa các trục robot
- Thiết lập điểm gốc
- Căn chỉnh TCP
- Teach các điểm cơ bản trong vùng làm việc
4.7. Kiểm tra chuyển động khô trước khi chạy tải
Trước khi đưa robot vào vận hành thực tế, cần tiến hành chạy thử không tải. Chạy khô giúp phát hiện sớm các lỗi lắp ráp, từ đó xử lý kịp thời trước khi robot làm việc với tải thực, đảm bảo an toàn và độ bền cho hệ thống.
- Chạy robot ở tốc độ thấp
- Kiểm tra các trục chuyển động có mượt hay không
- Giám sát độ rung và phát hiện sớm âm thanh bất thường
- Kiểm tra vùng làm việc và va chạm
5. Cài đặt phần mềm & lập trình điều khiển ban đầu
Sau khi hoàn tất lắp ráp cơ khí và kết nối phần cứng, bước tiếp theo là cài đặt phần mềm và lập trình điều khiển ban đầu cho robot công nghiệp. Đây là giai đoạn giúp robot “hiểu” được chuyển động, vùng làm việc và các giới hạn an toàn trước khi đưa vào sản xuất thực tế.

5.1. Kết nối robot với máy tính / bộ dạy
Việc kết nối ổn định là điều kiện tiên quyết để thực hiện các bước lập trình và hiệu chỉnh tiếp theo. Trước tiên, cần thiết lập kết nối giữa robot và thiết bị điều khiển:
- Kết nối robot với bộ dạy theo đúng chuẩn của nhà sản xuất
- Trường hợp lập trình trên máy tính, kết nối thông qua cổng Ethernet hoặc cổng truyền thông tương ứng
- Kiểm tra trạng thái kết nối và quyền truy cập hệ thống
- Đảm bảo robot đang ở chế độ an toàn
5.2. Cài đặt phần mềm điều khiển
Phần mềm điều khiển robot thường được cung cấp kèm theo bởi nhà sản xuất hoặc đơn vị tích hợp. Việc cài đặt đúng phần mềm giúp tránh lỗi không tương thích và đảm bảo robot hoạt động theo đúng cấu hình thiết kế.
- Cài đặt phần mềm điều khiển robot trên máy tính hoặc bộ dạy
- Kiểm tra phiên bản phần mềm và tính tương thích với controller
- Nạp cấu hình robot (model, số trục, tải trọng)
- Kiểm tra giao diện và các chức năng điều khiển cơ bản
5.3. Lập trình các chuyển động cơ bản (JOG)
Sau khi cài đặt phần mềm, tiến hành lập trình và kiểm tra các chuyển động cơ bản của robot.
- Thực hiện JOG từng trục riêng lẻ
- Kiểm tra chiều quay và phạm vi chuyển động của mỗi trục
- Điều chỉnh tốc độ JOG phù hợp để đảm bảo an toàn
- Kiểm tra phản hồi vị trí và độ mượt khi di chuyển
5.4. Thiết lập các thông số an toàn (giới hạn trục, tốc độ…)
Thiết lập an toàn là bước không thể bỏ qua trước khi robot làm việc thực tế. Các thông số an toàn giúp giảm thiểu rủi ro va chạm, bảo vệ người vận hành và thiết bị xung quanh.
- Cài đặt giới hạn hành trình cho từng trục
- Giới hạn tốc độ chuyển động trong chế độ dạy và chạy tự động
- Thiết lập vùng làm việc an toàn
- Kiểm tra hoạt động của nút dừng khẩn cấp
5.5. Chạy thử chương trình mẫu
Cuối cùng, tiến hành chạy thử chương trình mẫu để kiểm tra tổng thể hệ thống. Việc chạy thử chương trình mẫu giúp xác nhận robot đã sẵn sàng cho bước tích hợp ứng dụng thực tế, đồng thời phát hiện sớm các lỗi cần điều chỉnh trước khi vận hành chính thức.
- Chạy chương trình demo do nhà sản xuất cung cấp
- Thực hiện các chuyển động cơ bản theo chu trình
- Quan sát độ chính xác, độ mượt và khả năng lặp lại
- Kiểm tra tín hiệu I/O và phản hồi từ các thiết bị ngoại vi
6. Các lỗi thường gặp khi lắp ráp robot và cách xử lý
Trong quá trình lắp ráp và vận hành robot công nghiệp lần đầu, việc phát sinh lỗi là điều khó tránh khỏi, đặc biệt khi hệ thống bao gồm nhiều thành phần cơ khí, điện và phần mềm. Việc nhận diện đúng nguyên nhân và xử lý kịp thời sẽ giúp giảm thời gian dừng máy và tránh hư hỏng thiết bị.

Hướng Dẫn Lắp Ráp Robot bao gồm lắp đặt khung bảo vệ xung quanh khu vực làm việc
6.1. Robot không nhận tín hiệu từ bộ điều khiển
Đây thường là lỗi xuất hiện ngay khi cấp nguồn hoặc trong lần kết nối đầu tiên giữa robot và bộ điều khiển. Robot có thể không khởi động, bộ dạy không nhận tín hiệu hoặc controller hiển thị cảnh báo lỗi truyền thông. Nguyên nhân chủ yếu đến từ việc đấu nối cáp chưa đúng chuẩn, cáp bị lỏng, nguồn cấp không ổn định hoặc cấu hình controller chưa tương thích với model robot đang sử dụng.
Để khắc phục, cần rà soát lại toàn bộ sơ đồ đấu dây theo tài liệu kỹ thuật của nhà sản xuất, xác nhận cáp nguồn và cáp tín hiệu được kết nối đúng chuẩn, đồng thời kiểm tra hệ thống tiếp địa và các thông số cấu hình điều khiển. Trong nhiều trường hợp, việc đồng bộ lại robot arm, servo drive và controller sẽ giúp khắc phục triệt để lỗi này.
6.2. Lỗi lệch trục sau khi lắp
Lỗi lệch trục thường không thể hiện rõ ngay từ đầu mà chỉ xuất hiện khi robot bắt đầu di chuyển theo chương trình. Robot có thể chạy sai vị trí, không về đúng điểm gốc hoặc quỹ đạo làm việc bị lệch so với thiết kế. Nguyên nhân cốt lõi thường nằm ở việc lắp cơ khí chưa đúng chuẩn, quá trình zero hóa trục chưa chính xác hoặc TCP chưa được hiệu chỉnh đúng.
Việc xử lý lỗi lệch trục đòi hỏi phải thực hiện lại các bước căn chỉnh ban đầu, bao gồm zero hóa encoder, kiểm tra vị trí lắp các trục và hiệu chỉnh lại điểm gốc cũng như TCP. Nếu bỏ qua lỗi này, robot có thể mất dần độ chính xác và gây mài mòn nhanh các bộ phận truyền động.
6.3. Robot di chuyển không mượt hoặc rung
Khi robot vận hành nhưng chuyển động không đều, rung lắc hoặc phát ra tiếng ồn bất thường, nhiều kỹ thuật viên thường nghĩ đến lỗi phần mềm. Tuy nhiên, trong đa số trường hợp, nguyên nhân lại đến từ yếu tố cơ khí và nền móng lắp đặt. Đế robot không đủ cứng, bu lông siết sai lực hoặc thông số servo chưa được tinh chỉnh theo tải thực tế đều có thể khiến robot mất ổn định khi di chuyển.
Để khắc phục, cần kiểm tra lại độ chắc chắn của đế robot, siết lại bu lông theo đúng lực tiêu chuẩn và tinh chỉnh thông số servo phù hợp với tải trọng và tốc độ làm việc. Việc xử lý sớm sẽ giúp robot vận hành mượt mà hơn và kéo dài tuổi thọ thiết bị.
6.4. Lỗi giới hạn hành trình / quá tải
Lỗi giới hạn hành trình hoặc quá tải thường xuất hiện khi robot bắt đầu làm việc trong điều kiện sản xuất thực tế. Robot có thể dừng đột ngột, báo lỗi servo hoặc không thể hoàn thành chu trình đã lập trình. Nguyên nhân phổ biến là do thiết kế vùng làm việc chưa hợp lý, lập trình quỹ đạo vượt quá giới hạn cho phép hoặc tải trọng đầu công cụ lớn hơn khả năng chịu tải của robot.
Trong trường hợp này, cần rà soát lại toàn bộ vùng làm việc, điều chỉnh giới hạn trục, tối ưu quỹ đạo chuyển động và tính toán lại tải trọng cũng như quán tính đầu công cụ. Việc thiết kế lại bài toán ứng dụng ngay từ đầu sẽ giúp robot hoạt động ổn định và tránh các lỗi lặp lại.
6.5. Lỗi kết nối phần mềm
Lỗi kết nối phần mềm thường xảy ra khi robot được lập trình thông qua máy tính hoặc khi hệ thống sử dụng nhiều thiết bị và phần mềm khác nhau. Robot có thể không nhận chương trình, không kết nối được với phần mềm điều khiển hoặc gặp khó khăn trong việc sao lưu dữ liệu. Nguyên nhân thường đến từ việc sử dụng sai phiên bản phần mềm, cấu hình mạng chưa đúng hoặc thiếu đồng bộ giữa máy tính và bộ điều khiển.
Để xử lý, cần kiểm tra lại phiên bản phần mềm, cấu hình địa chỉ IP và đảm bảo các thiết bị được kết nối trong cùng một hệ thống mạng ổn định. Việc tiêu chuẩn hóa phần mềm và quy trình lập trình sẽ giúp quá trình vận hành và bảo trì robot trở nên dễ dàng hơn về lâu dài.
7. Lưu ý quan trọng khi lắp đặt robot lần đầu
Lắp đặt robot công nghiệp lần đầu là giai đoạn mang tính quyết định đến hiệu quả vận hành lâu dài của toàn bộ hệ thống. Ở bước này, chỉ cần một sai sót nhỏ trong tư duy triển khai hoặc quy trình kỹ thuật cũng có thể dẫn đến hàng loạt vấn đề về độ chính xác, độ ổn định và an toàn trong quá trình sản xuất. Vì vậy, việc nắm rõ những lưu ý quan trọng ngay từ đầu sẽ giúp kỹ thuật viên và doanh nghiệp tránh được rủi ro không đáng có và tối ưu hiệu quả đầu tư robot.

Hướng Dẫn Lắp Ráp Robot dựa trên bản vẽ kỹ thuật và sơ đồ của nhà sản xuất
7.1. Sai lầm phổ biến của kỹ thuật viên mới
Một trong những sai lầm thường gặp nhất của kỹ thuật viên mới là chủ quan trong khâu chuẩn bị và căn chỉnh ban đầu. Nhiều trường hợp lắp đặt robot theo kinh nghiệm cá nhân hoặc “ước lượng” thay vì tuân thủ chặt chẽ hướng dẫn kỹ thuật của nhà sản xuất. Điều này dễ dẫn đến việc lắp sai vị trí trục, siết bu lông không đúng lực hoặc bỏ qua bước zero hóa và hiệu chỉnh TCP.
Bên cạnh đó, việc tập trung quá nhiều vào phần cơ khí mà xem nhẹ yếu tố điện – điều khiển và phần mềm cũng là nguyên nhân khiến robot hoạt động không ổn định. Robot công nghiệp là một hệ thống tổng thể, do đó mọi bước từ lắp đặt, đấu nối đến lập trình đều cần được thực hiện đồng bộ và có kiểm soát.
7.2. Yêu cầu về đồng bộ hóa bộ điều khiển – servo – công suất
Một hệ thống robot chỉ có thể vận hành ổn định khi bộ điều khiển, servo và công suất được đồng bộ đúng chuẩn. Trong thực tế, nhiều lỗi phát sinh không phải do robot kém chất lượng mà do các thành phần này không tương thích hoặc cấu hình chưa phù hợp với tải thực tế.
Việc lựa chọn sai công suất servo, thiết lập thông số điều khiển chưa phù hợp hoặc sử dụng bộ điều khiển không đúng phiên bản có thể khiến robot chạy rung, báo lỗi quá tải hoặc giảm độ chính xác khi làm việc. Do đó, ngay từ giai đoạn lắp đặt, cần tính toán chính xác tải trọng, quán tính đầu công cụ và đảm bảo các thiết bị điều khiển được cấu hình đồng bộ theo đúng khuyến nghị kỹ thuật.
7.3. Lưu ý về an toàn khu vực làm việc của robot
An toàn luôn là yếu tố bắt buộc khi lắp đặt robot công nghiệp, đặc biệt trong môi trường nhà máy có nhiều người và thiết bị cùng hoạt động. Khi lắp robot lần đầu, cần xác định rõ vùng làm việc và vùng nguy hiểm của robot, từ đó bố trí hàng rào an toàn, cảm biến cửa, rèm quang hoặc các thiết bị bảo vệ phù hợp.
Ngoài ra, khu vực robot cần được trang bị đầy đủ nút dừng khẩn cấp và biển cảnh báo rõ ràng. Kỹ thuật viên vận hành phải được đào tạo bài bản, hiểu rõ nguyên lý hoạt động và các tình huống rủi ro có thể xảy ra. Việc đảm bảo an toàn ngay từ khâu lắp đặt không chỉ bảo vệ con người mà còn giúp hệ thống robot vận hành ổn định, tuân thủ các tiêu chuẩn an toàn trong sản xuất công nghiệp.
8. Ứng dụng thực tế của robot sau khi lắp ráp hoàn chỉnh
Sau khi hoàn tất quá trình lắp ráp, căn chỉnh và lập trình ban đầu, robot công nghiệp có thể được tích hợp trực tiếp vào dây chuyền sản xuất để thực hiện nhiều công việc khác nhau. Ở giai đoạn này, robot không chỉ đơn thuần là một thiết bị tự động, mà trở thành một mắt xích quan trọng giúp tối ưu năng suất, nâng cao chất lượng và ổn định quy trình sản xuất cho doanh nghiệp.

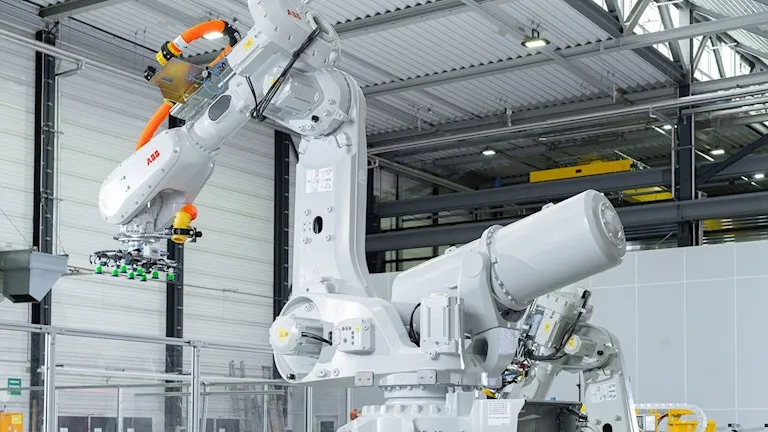
Hướng Dẫn Lắp Ráp Robot giúp robot hàn vận hành ổn định và chính xác trong sản xuất
8.1. Tích hợp dây chuyền hàn tự động
Trong các dây chuyền hàn tự động, robot đóng vai trò trung tâm trong việc thực hiện các mối hàn lặp đi lặp lại với độ chính xác cao. Sau khi được lắp ráp và căn chỉnh đúng chuẩn, robot hàn có thể hoạt động liên tục, duy trì chất lượng mối hàn đồng đều, giảm thiểu sai sót do yếu tố con người.
Việc tích hợp robot vào dây chuyền hàn giúp doanh nghiệp nâng cao năng suất, cải thiện chất lượng mối hàn và đảm bảo an toàn lao động, đặc biệt trong các môi trường làm việc có nhiệt độ cao, khói bụi hoặc tia hồ quang.
8.2. Gắp – đặt linh kiện
Robot gắp – đặt được ứng dụng rộng rãi trong các dây chuyền lắp ráp, cấp phôi và phân loại sản phẩm. Sau khi lắp ráp hoàn chỉnh, robot có thể thực hiện thao tác gắp – đặt với tốc độ cao, độ lặp chính xác và khả năng làm việc liên tục trong thời gian dài.
Ứng dụng này giúp giảm thời gian chu kỳ, hạn chế lỗi sai trong quá trình lắp ráp và đặc biệt phù hợp với các dây chuyền yêu cầu độ chính xác cao như điện tử, cơ khí chính xác và sản xuất hàng loạt.
8.3. Phân loại – đóng gói – palletizer
Trong lĩnh vực đóng gói và logistics nội bộ, robot palletizing và robot phân loại mang lại hiệu quả rõ rệt. Sau khi được lắp đặt và cấu hình đúng chuẩn, robot có thể tự động phân loại sản phẩm, xếp thùng và xếp pallet theo đúng quy cách, đảm bảo tính đồng đều và ổn định.
Việc ứng dụng robot trong khâu này giúp doanh nghiệp giảm phụ thuộc vào nhân công nặng nhọc, tăng độ chính xác khi xếp hàng và tối ưu không gian kho bãi, đồng thời nâng cao khả năng kiểm soát chất lượng trong khâu đóng gói.
8.4. Ứng dụng trong gia công, đánh bóng, mài
Robot công nghiệp cũng được ứng dụng hiệu quả trong các công đoạn gia công hoàn thiện bề mặt như mài, đánh bóng và xử lý chi tiết. Khi được lắp ráp và hiệu chỉnh đúng kỹ thuật, robot có thể duy trì lực tiếp xúc ổn định, đảm bảo chất lượng bề mặt đồng đều giữa các sản phẩm.
Ứng dụng này đặc biệt phù hợp với các ngành cơ khí chế tạo, khuôn mẫu và sản xuất linh kiện kim loại, nơi yêu cầu cao về độ đồng nhất và chất lượng bề mặt. Việc sử dụng robot giúp giảm sức lao động thủ công, nâng cao độ chính xác và cải thiện môi trường làm việc cho người vận hành.
9. Dịch vụ hỗ trợ lắp ráp – tích hợp robot tại DMTec
Không chỉ dừng lại ở việc cung cấp thiết bị, DMTec định hướng trở thành đơn vị đồng hành kỹ thuật cùng doanh nghiệp trong suốt quá trình triển khai và vận hành hệ thống robot công nghiệp. Với kinh nghiệm thực tế trong nhiều dự án tự động hóa, DMTec mang đến giải pháp lắp ráp – tích hợp robot bài bản, giúp khách hàng khai thác tối đa hiệu quả đầu tư và yên tâm trong quá trình sử dụng.

Hệ Sinh Thái Giải Pháp Cơ Khí Đồng Bộ: Cắt – Chấn – Hàn – Khắc Laser
9.1. Tư vấn giải pháp robot theo bài toán sản xuất
Mỗi doanh nghiệp đều có bài toán sản xuất riêng về sản lượng, không gian, loại sản phẩm và ngân sách đầu tư. DMTec bắt đầu bằng việc khảo sát thực tế dây chuyền, phân tích yêu cầu công nghệ và mục tiêu sản xuất, từ đó tư vấn loại robot, cấu hình và giải pháp tích hợp phù hợp nhất.
Cách tiếp cận này giúp khách hàng tránh đầu tư dàn trải, lựa chọn đúng robot ngay từ đầu và đảm bảo hệ thống có khả năng mở rộng trong tương lai.
9.2. Dịch vụ lắp đặt – lập trình – bàn giao công nghệ
DMTec cung cấp trọn gói dịch vụ từ lắp đặt cơ khí, đấu nối điện – điều khiển, lập trình robot đến chạy thử và nghiệm thu hệ thống. Mọi công đoạn đều được thực hiện bởi đội ngũ kỹ sư giàu kinh nghiệm, tuân thủ quy trình kỹ thuật và tiêu chuẩn an toàn nhà máy.
Sau khi hoàn thiện, DMTec tiến hành bàn giao công nghệ và đào tạo vận hành cho đội ngũ kỹ thuật của khách hàng, giúp doanh nghiệp chủ động khai thác robot mà không phụ thuộc hoàn toàn vào nhà cung cấp.
9.3. Hỗ trợ bảo trì – tối ưu tốc độ – tối ưu chu kỳ
Trong quá trình vận hành thực tế, DMTec tiếp tục đồng hành thông qua các dịch vụ bảo trì định kỳ, kiểm tra hệ thống và tối ưu chương trình robot. Việc tinh chỉnh tốc độ, quỹ đạo chuyển động và chu kỳ làm việc giúp robot vận hành mượt mà hơn, giảm hao mòn và nâng cao năng suất tổng thể.
Dịch vụ này đặc biệt phù hợp với các nhà máy muốn tối ưu chi phí vận hành và kéo dài tuổi thọ thiết bị robot.
9.4. Quy trình kỹ thuật chuẩn nhà máy giúp khách hàng yên tâm
Toàn bộ dịch vụ lắp ráp và tích hợp robot tại DMTec được triển khai theo quy trình kỹ thuật chuẩn nhà máy, từ khâu khảo sát, thiết kế, lắp đặt đến nghiệm thu và hậu mãi. Mỗi dự án đều có hồ sơ kỹ thuật rõ ràng, tài liệu bàn giao đầy đủ và kế hoạch hỗ trợ lâu dài.
Chính sự bài bản và minh bạch này giúp khách hàng yên tâm khi đầu tư robot công nghiệp, đồng thời đảm bảo hệ thống vận hành ổn định, an toàn và hiệu quả trong suốt vòng đời sử dụng.
CÔNG TY CỔ PHẦN DIMEC
Trụ sở chính: 97 Đức Giang, Phường Bồ Đề, Thành phố Hà Nội, Việt Nam
Website: Dimec.vn
Fanpage: Thiết Bị Cơ Khí DMTec
TikTok: Thiết Bị Cơ Khí DMTec
Youtube: Thiết Bị Cơ Khí DMTec
Hotline: 0981286798
Email: admim@dimec.vn